- 2023.06.11
- 記事構成見直しおよび注意点を追記
- 2010.11.01
- 新規作成

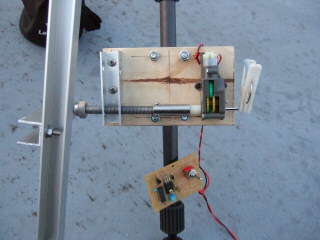
DCブラシレスモーターを使って、タンジェントアーム方式の自作赤道儀を作りました。
以前製作したものは、下記のリンクから参照してください。 今回は、基本構造は変えずに、精度向上を図ります。
原理は、旧バージョンの記事を参照するものとしてまず、問題点を整理します。
(参考)旧バージョン:「ろくろを使って赤道儀を作ろう!」
○先代の問題点
- ろくろの軸の剛性不足により、回転軸がぶれて像に歪みを生じる
- モーターの回転数精度が悪く、調整も困難である
- 極軸望遠鏡が一般的な単眼鏡であるため、北極星の導入が困難である
- 三脚を傾けて使用するため、安定性に問題がある
- 無駄に重すぎる
○問題点に対する方針
・ろくろの軸の剛性不足 → 2ベアリング構造化
先代のろくろちゃん2号は、極軸に「手回しろくろ」を使用していますが、 ろくろは1個のベアリングで構成されており、 加重の偏りに弱い構造になっています。
このため、撮影中のカメラ位置によって軸がずれてしまい、 カメラ位置の変更のたび、極軸あわせが必要でした。
これを改善するため、2ベアリング構造にし、 極軸部分の剛性を高くします。
・モーターの回転数精度不足 → DCブラシレスモーターのPID制御
先代はCRを利用したアナログ発振によるPWM制御回路を使用して、 DCモータの速度制御を行っています。
この方法では微調整が難しく、温度依存性があり カメラ位置や装備による加重の変更による、負荷の違いにも対応できません。
これを改善するため、駆動部にDCブラシレスモータを用い、 速度フィードバック制御を導入します。
・極軸望遠鏡が一般的な単眼鏡→ダットサイト化単眼鏡の中心にクロスヘアがないため、北極星の導入が困難でした。
これを改善するため、LEDを使用したダットサイトを導入します。(注:最終的に専用の極軸望遠鏡にしました)
・三脚とタンジェントアーム位置の最適化三脚とろくろを結合し、地軸の傾きに合わせる必要があるため 三脚の足を1本短くして配置するなど、安定性に欠ける構造でした。
これを改善するため、初期より配置を考慮して設計し 三脚が水平開脚で使用できるよう、設計を見直しました
・ろくろが重すぎる→極軸構造を自作して軽量化重いんです。すんごく。これでは持ち運べません。 なんで軸にろくろを選んだのか、途中で後悔したほどです。
というわけで、ろくろを使うのはやめました…。
タンジェントアーム方式の赤道儀やその動作原理については、旧バージョンの記事を参照してください。
(参考)旧バージョン:「ろくろを使って赤道儀を作ろう!」
ここでは、DCブラシレスモーター制御回路および、周辺部品について述べます
- 図中、VCCは5Vです
- UP~WP モータ出力Positive(ハイサイド)側。N側と対でモータ電流方向を決める
- UN~WN モータ出力Negative(ローサイド)側。P側と対でモータ電流方向を決める
- USTA~VSTA モータ位置情報。波形成形済み入力
- PWM モータ回転速度制御
- LED 回転数安定,orSTOP表示にするつもり
- FWD/REW モータ回転方向制御。停止あり
- FWD/REW LIM 赤道議位置限界入力。入力でモータ停止。
DCブラシレスモータ自体の駆動原理は省きます。 制御方法は、トラ技2000年2月号を参考にしました。 制御手法のみならず、実際の波形も掲載されており、 かゆいところに手が届く、良書だと思います。
再編集したものが、CQ出版から出ております(2023注記:いつのまにか絶版みたいです……。)
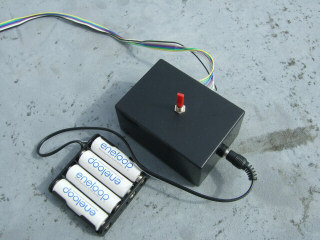
モーター制御部外観です。
電源とスイッチがあるだけです。 複雑な制御は、すべて中のCPUで実現します。
内部配線はこんな感じです。
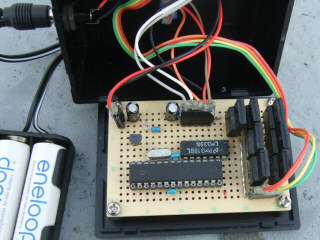
AtmelのAtmega328Pという1チップマイコンを使用しています。 マイコンには自作のソフトウェアを書き込んでおり、 PID制御でDCブラシレスモータの一定速度制御を実現します。 正方向は3200rpm、巻き戻しは最速で戻る仕様です。 電源はACアダプタでも電池でも問題ありません。 電源の違いは、すべてソフトウェアで吸収されます。 時計をクリスタルで持っているため、温度特性も問題ないはずです。 そのうち、電池切れインジケーターもつけたいところです。
使用したパーツ:
極軸-タンジェントアーム
- ピロー形ユニット無給油式ベアリング UCP204 2個
- SUS304切板 5x150x200mm 1枚
- SUS304切板 5x150x150mm 1枚
- YSCA形 加工付リニアシャフトYSCA20-231-G21-V16-P10 1本
- 1000mm アルミ材(ロの字)雲台用
- 1000mm アルミ材(ロの字)タンジェントアーム用用
- ダットサイト
- ねじ各種
キモとなるのは、「YSCA形 加工付リニアシャフト」で、 20φのSUS軸の先端にM10のネジを切る加工品です。 monotaroにて発注しました。
駆動部
- アルミ切板 5x100x200mm 1枚
- SUSM10ボルト
- SUSM10ボルト用キャップ
- ユニクロU字固定金具
- ABS内径10φパイプ
- SUS高ナット M10
- SUS金具
- SUS棒 3φ
- SUS棒 0.5φ
- SUS M8ワッシャー
- タミヤ4速遊星ギヤーボックスセットx2
- ジャンクHDD(HITACHI 500G 7200rpm)
- ねじ各種
モータは部屋に転がっていたジャンクHDDを流用しました。
モーター制御部
- ATMEGA328P
- LM339N
- 2SK2936 x 4
- 2SJ471 x 3
- 2SC2712GR
- 2SA1162GR
- 2SC1815GR
- crystal 16MHz
- 電解コンデンサ 100uF 16V x 2
- 単3エネループ x4
- 電池ボックス
- トグルスイッチ
- 他、コネクタ、ピンヘッダ、ユニバーサル基板
- コンデンサ、抵抗など
モーター制御部は、振り向き君に使用していた物です。 もちろん、天体撮影用に制御ソフトを作り込んでいます。
別に必要なもの
- 三脚
- 自由雲台
- ACアダプタ(AC使用時)
- カメラ
- ストップウオッチ
回路部品は、すべて秋月電子通商で揃えました。
- Atmega328Pで動作します。
- とりあえず、HDDのモータを回すことぐらいはできるかもです。
- 個人的になら、自由に使ってもらってかまいません。
プログラムの簡単な説明:
タイミングチャート(クリックで拡大)

上記タイミングチャートの通り、①~⑥までのパターンを1周期として、電機子の制御を行います。
2023注:記憶を頼りに書き起こしてみました。 "delay"って変数名が奇妙だけど、プログラム中の表記もそうなってるんでそのまま記載しています。
- 回転位置信号(PORTC変化)を検出したら、PWM動作開始
- 回転位置検出間隔(これがdelay。初期値==500カウント)から、PID制御でPWMのDUTYを設定
- 1/2*delayで励磁コイル組み合わせ変更(励磁コイルの組み合わせは、タイミングチャートの①から⑥6パターン)
- 3/4*delay(これがpledelay)でPWM動作を停止して、回転位置の検出を待つ(駆動電圧ノイズを回避する)
- 1.に戻って繰り返し
2023.6.11★★★★★注意★★★★★
ソースを見たら、励磁コイルの組み合わせ変更時に、FET制御ポートをすべて同時に変更しているようです。 このやり方は、FETの動作タイミングによってはローサイドとハイサイドが同時にONになる可能性があり、 FETが壊れる可能性があります。つまり、とてもよくない制御です。 回路を工夫するか、制御タイミングをずらして、FETが同時にONにならないよう工夫する必要がありますね。 あの頃は若かったってことで。参考にする方は十分注意してください。
速度制御は、ローサイド側をPWM制御することで行います。(回路図参照)
コイルの逆起電力を利用して回転位置検出をしています。 回転位置信号を利用して、PID制御を行います。 PIDの目標は、回転数=3200rpmに設定しています。 3200rpmは、6周期で1周するモーターの場合です。
巻き戻し時は速度制御を行わず、最速回転を行います
FWD/REW LIMが入ると、モータを停止します
以下、駆動波形の一部です 回転子位置の検出直前にPWMを停止しているのが分かります。
組み立て後全景です

先代のコンセプトを受け継ぎつつ、 しっかりした足回りと剛性の高いフレームに支えられ 納得のいく精度に仕上がりました。

横から。
ろくろがない分すっきりです。 駆動部の配置を工夫したため、三脚もきれいに開いています。
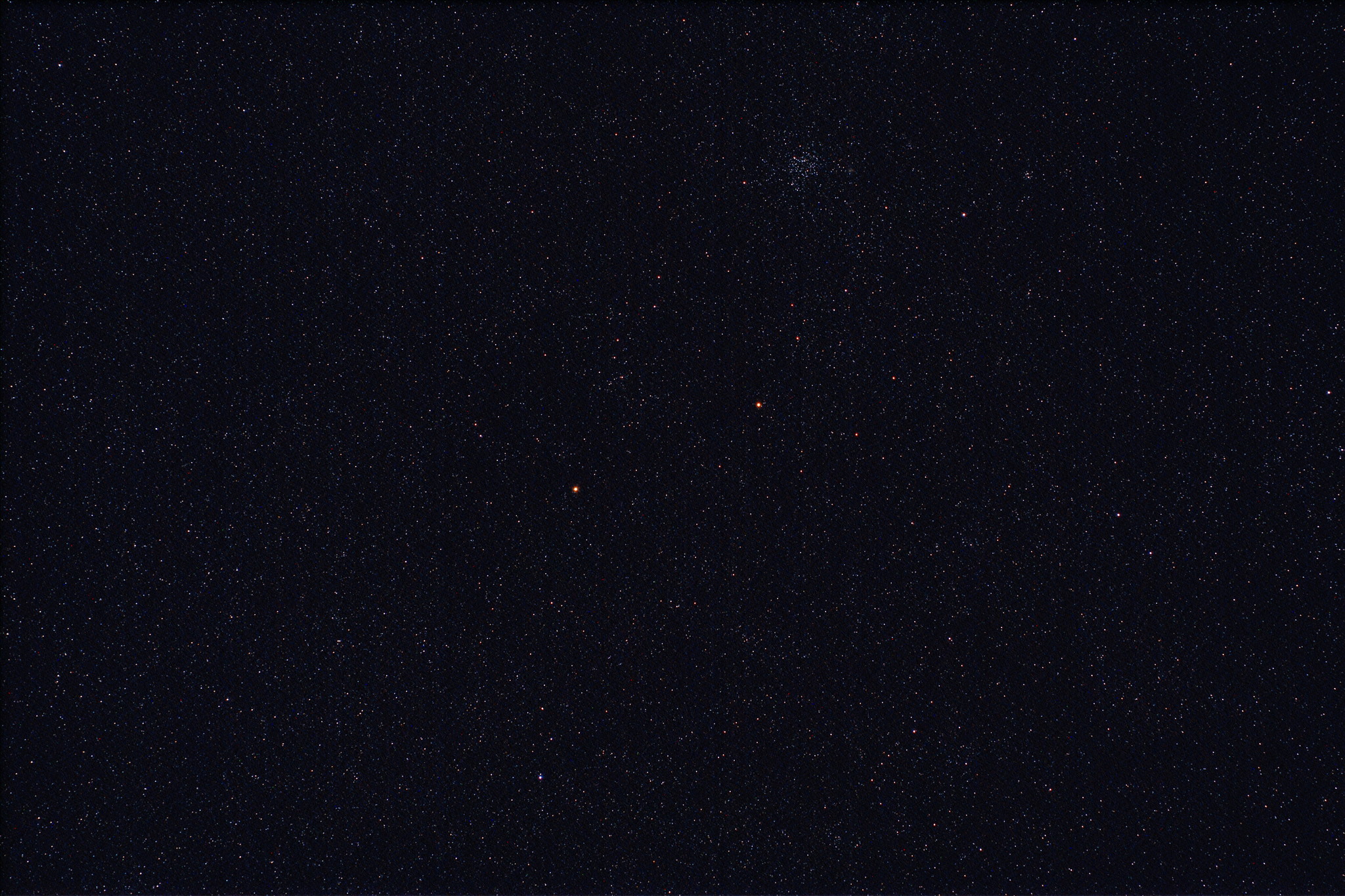
以下は、赤道儀およびEOS7Dによる作例です(クリックで拡大します)
ハートレー第2彗星(こいぬ座周辺) EOS 7D EF100mm F2.8Lマクロ IS USM 60秒 x 8枚コンポジット

エメラルドグリーンに光っているのがハートレー第2彗星です。
彗星部分だけトリミングしたのがこちら
ハートレー第2彗星

先代の赤道儀より長時間連続で駆動可能なため、 10枚程度のコンポジット撮影が可能になりました。
コンポジット撮影をするとノイズがぐっと減るので、 彗星のベールなどの淡い光も浮かび上がってきます。
ふたご座M35周辺 散開星団群 EOS 7D EF100mm F2.8Lマクロ IS USM 60秒 x 10枚コンポジット
このあたりは散開星団の宝庫です 大きなM35から、NGC2158,IC2157,NGC2149まで、ずらり勢揃い。
M35周辺

- 中央左の大きい散開星団がM35
- 中央右の小さい散開星団がNGC2158
- 右上がIC2157
赤道儀の極軸精度向上により、追尾性能が向上し 小さな散開星団も解像するようになりました。
テストでは、4分露出しても、ほぼ点像という満足のいく結果です。
苦労したところなどのメモ書きです
1.極軸およびタンジェントアーム部分
まず改善が必要だったのは極軸の剛性向上です。
SUS軸を使用し、ベアリングも2本間隔をあけて使用することで、剛性を格段に向上させています

緑色のごついパーツがベアリングで、20φのSUS軸を支えています

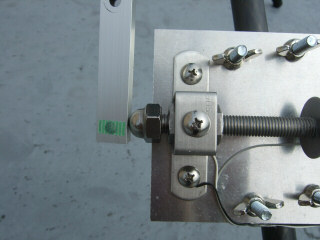
上から見るとこんな様子です。
ベアリングはM10のボルトで固定しており、 SUS板はすべて5mm厚です。 剛性はかなり高く、軸ぶれは皆無になりました。
しかし、剛性をあげるために素材にしっかりした物を選んだ結果 すごい重量になってしまいました。 それでも、ろくろほどではありませんが…。

極軸をSUS板に固定する部分は、M10緩み止めナットを使用しました。
極軸は特注のSUS YSCA形 加工付リニアシャフトを使用しており、 こんな形をしています

実際には、こんな形状で加工依頼しました
さすがSUS 20φ、びくともしません。
極軸望遠鏡も交換しました。

右上に見えているのが、ダットサイトです。 マシンガンの照準等で有名な、あれです。 照準の中央に、目に優しい赤点を表示してくれます。

重量バランスの関係で、カメラアームを長めにとっています。 先端には、雲台が取り付けられるようになっています。
2.駆動部
DCブラシレスモーターの回転数制御は、前述の回路および制御の通りです。
駆動部は、DCブラシレスモーターに加え、遊星ギアを多段で使用しています。 これによりギア比を稼ぐことで、なめらかな回転(タンジェントアーム押し出し)になるように工夫しています。
タミヤ遊星ギヤーボックスセットを回転させ、M10のボルトを送り出す構造です。
駆動部分へ伸びるアームは、 先代の「コの字」から「ロの字」に変更しています。 「コの字」の場合、ひねり方向への剛性が不足している と感じたためです。
ただし、「ロの字」は「ロの字」でも、 断面積の小さい物を選び、軽量を維持しています。
また配置を工夫し、 タンジェントアームとボルトが直交する配置に設計しました。 安定性向上と、タンジェントエラー対策を兼ねます。

ボルトを支える部分は、先代では摩耗がひどかったので、 SUS M10の高ナットを使用しています。

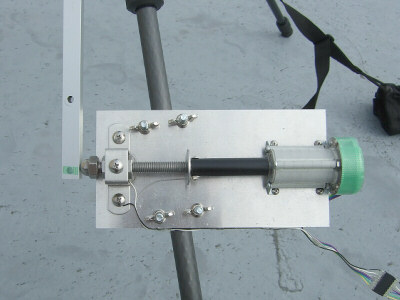
動力には、HDDのモータを使用します。
HDDのモータはDCブラシレスモータと呼ばれる特殊なモータで、 回転速度のフィードバック制御を、容易に行うことが出来ます。
つまり、常に一定速度の回転を得るにはもってこい、というわけです。

なんとか形になっていますが、タミヤの遊星ギアボックスセットは 非常に剛性が低く、ねじで強く固定するだけで動かなくなります。 このため、少々複雑な固定方法をとっています。
モーター回転をどうやってギアに伝えるか悩んだのですが、 遊星ギアボックスセットのギアを加工し、モータ軸に直接接合する方法をとりました。
ギア比は5x5x4x4x4=1600:1です

ギアとボルトの接合は、 真鍮軸とABSパイプで実現しました。
ABSパイプの側面切った溝へ、真鍮軸にとめたボルトがひっかかり、 ABSパイプとM10のボルトを押し出してゆく構造です。

見えにくいですが、回しすぎ防止用に、スイッチをつけました。 ワッシャーが針金に接触すると、モータが止まるように設計しています。
巻き戻し時にも、自動で停止までやってくれるので、 撮影準備中、非常に楽が出来ます。


スイッチ部分の拡大です。
スイッチは、ボディーをGNDとし、針金と接触するとONになる構造です 針金部分はプラスチックのワッシャーで電気的に絶縁しています。

裏側は、滑り止め用にゴムシートを貼り付けています。
3.その他・次に向けて
今回のポイントは、
- 軸精度の向上
- 回転速度制御の安定化
でした
1については、SUS板や極太SUS軸のおかげで非常に安定し、 軸ぶれの心配は不要になりました。
そのかわり、SUSの加工は大変でした。 ハンドドリルや、棒やすりでは、ほとんど傷しかつきません。 ついに、卓上ボール版まで手を出して、やっとの完成です。
2については、DCブラシレスモータの制御ソフトからつくったこともあり、 モーター単体の精度は、何分どころか数十分回しても問題ない精度です。 タンジェントアームの構造上、そこまで回せませんが。
なにより、2でワンチップマイコンの使い方をずいぶん覚えたので、 工作の幅が広がったのは、大きな収穫だったかもしれません。
次は何を作ろうかな!
ではまた、新月の夜に。
[ DIYに戻る ]